|
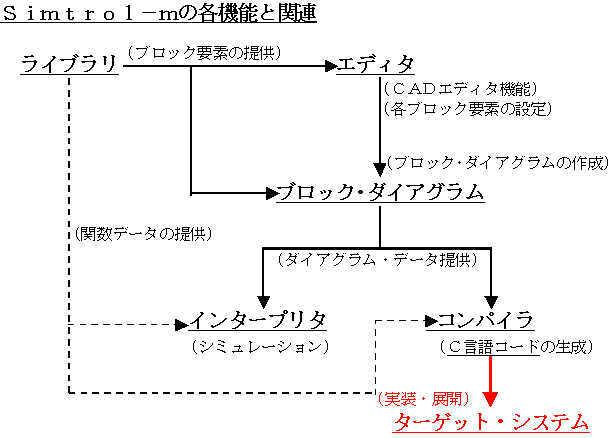
Simtrol-m(シムトロール・エム)は、モータ制御系/組込み制御系のソフトウェア開発を
サポートします。
ブロック・ダイアグラムを作成し、シミュレーションを実行し、対応するC言語ソース・コードを
生成します。
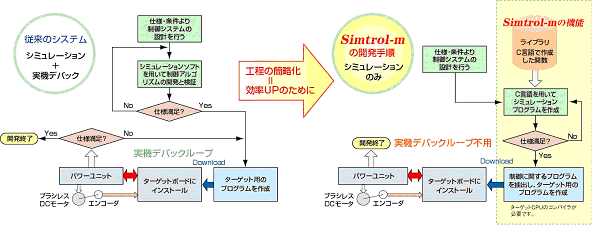
組込み系ソフトウェア開発におけるシミュレーション工程と、
プログラミング言語によるモジュールの開発工程(ROM化処理)を一体化できます。
工程間のギャップを生じさせることなく、スムーズに開発を進行させることが可能です。
各処理とデータの整合も自動的に確保されますので、各工程間でのデータの整合を気にする
必要はありません。
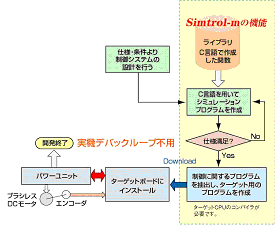
特にモータ制御に関しては、必要な制御要素が関数ライブラリとして搭載されているので
非常に便利です。
すなわち、ブロック・ダイアグラムによる制御アルゴリズムの設計・構築及び
シミュレーションによるその解析・検証の結果を直接反映させた、C言語ソース・コードを
作成できるので、実機上で改めて制御プログラムを作成する必要がなくなります。
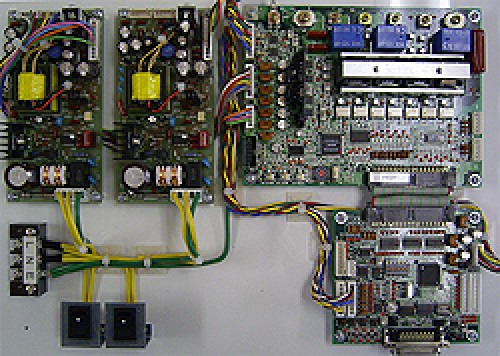
最近はパソコンと実機(マイコン)の間の通信環境は容易に整いますので、
パソコン上での制御アルゴリズム設計/ソース・コード作成と実機上での動作検証を
同時に進行させることも可能です。 |

 ― シミュレーションからROM組み込みまで ―
― シミュレーションからROM組み込みまで ―