非常用電源システム・高電圧充電器
教育・実験・研究・試験用
新規01工業用
モータ制御
交直流電力変換装置
モータ・温度・プロセスの P I D 制御実習装置
太陽電池・風力発電システム
シーケンシャル制御負荷装置
マイコンボード・産業用パソコン
電子・電気工学実験装置
電源試験装置
価格表
産業用コンピュータ パーソナルコンピュータ
オンラインショップ
工事・ME部
企業情報
お問い合わせ
サイトマップ
トップに戻る
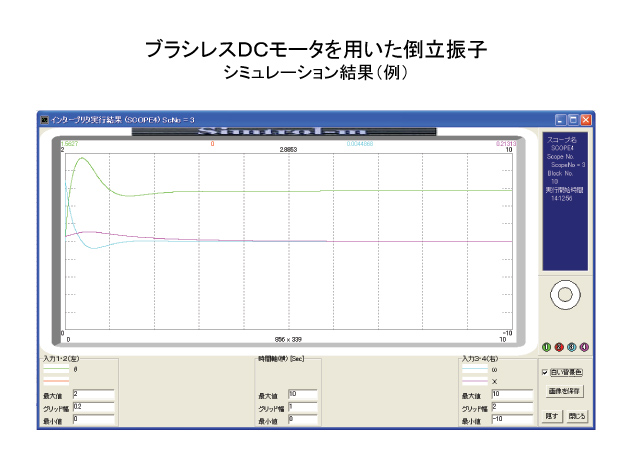
−シミュレーションからROM組み込みまで−
●ブラシレスDCモータとPID制御による倒立振子の制御例
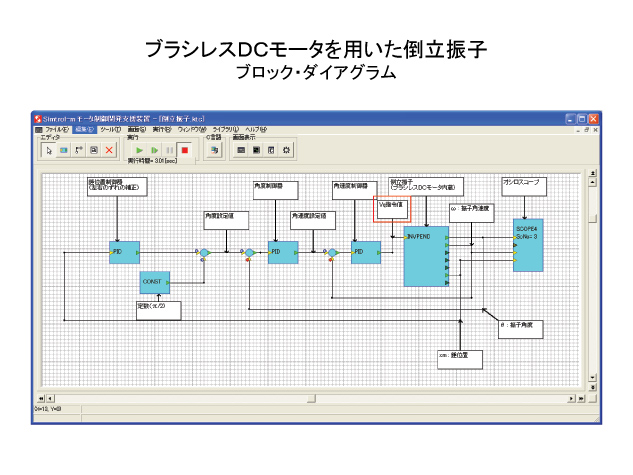
Simtrol−mで倒立振子制御のブロック・ダイアグラムを作成しました。 また、実際にブラシレスDCモータで倒立振子装置を作成し、動作させてみました。
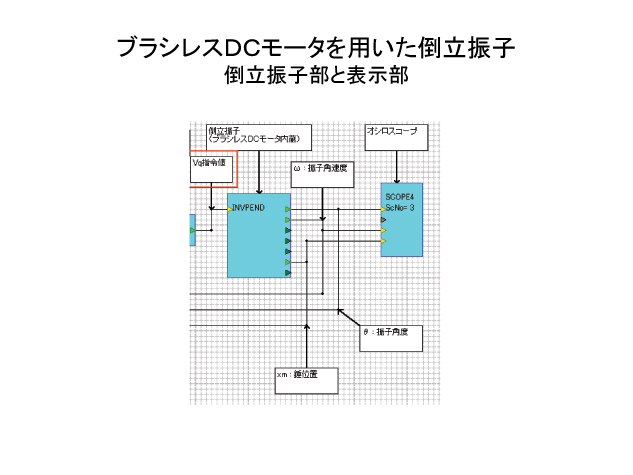
倒立振子のブロック(INVPEND)は左右に動く台車上に棒振子をフリー・ジョイントし、 台車の左右の運動を制御し、棒振子を立てる装置を仮定しています。
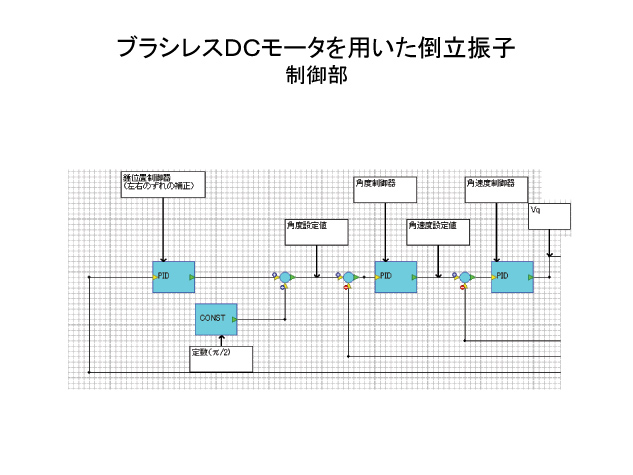
なお、倒立振子の制御には通常、現代制御理論が用いられますが、 今回は古典制御のPID制御方式にて実行しています。
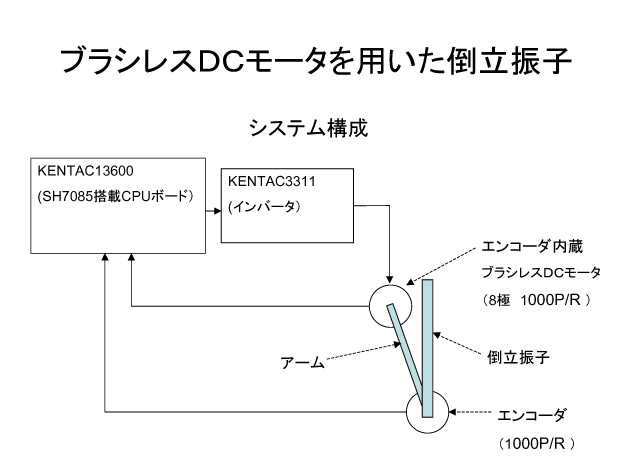
*ブラシレスDCモータによる倒立振子制御の実例
・ブラシレスDCモータの回転軸に ロータリー・エンコーダを介して、 棒振子をフリーに連結した構造の 倒立振子を作成してみました。 ・ロータリー・エンコーダで棒振子の 位置(角度)を検出し、 ブラシレスDCモータの速度を制御し、 倒立振子を制御します。