|
|

−シミュレーションからROM組み込みまで−
|
|
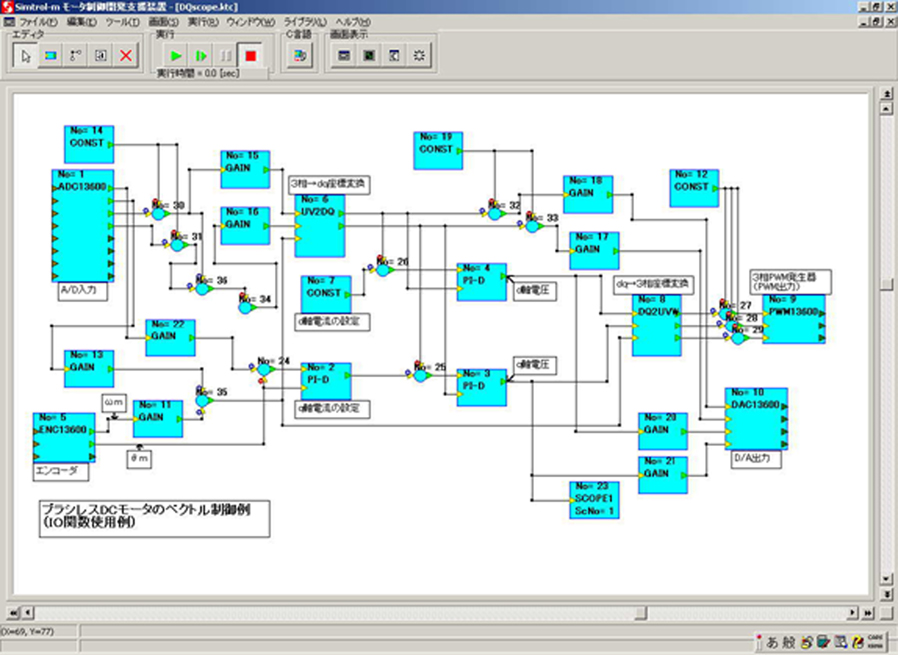
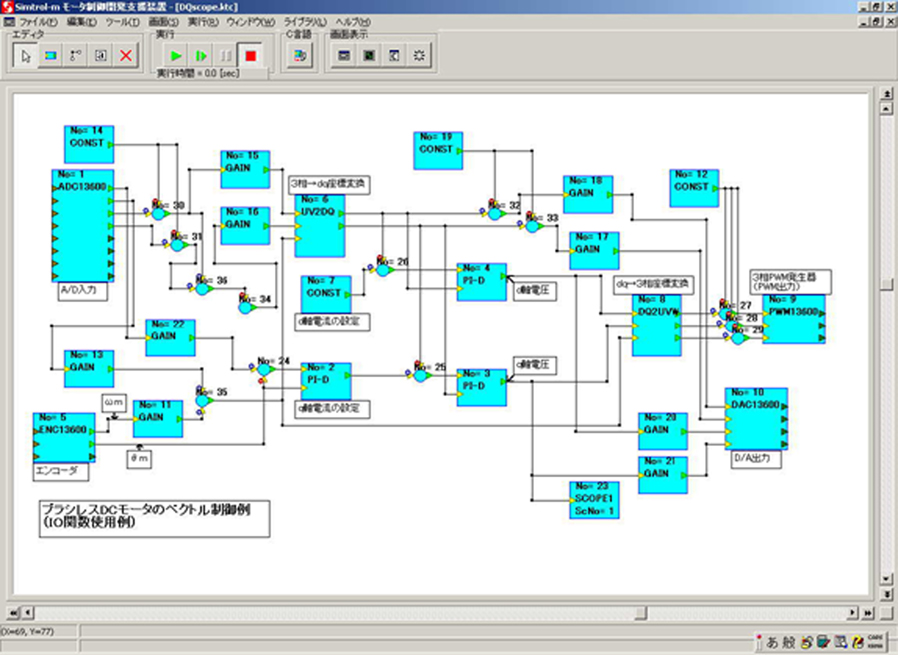
| ●ブラシレスDCモータのベクトル制御例 |
|
ブラシレスDCモータを、原理に基づき、ベクトル制御で回すブロック・ダイアグラムです。
3相交流系(U軸、V軸)から直流系(D軸、Q軸)へのベクトル変換ブロック及び、
その逆変換ブロックを使用しています。
Simtrol−mに実装の、各種I/0コントロール用関数ブロック(A/D、D/A、エンコーダ、
PWMなど)を使用しています。
Simtrol−mは当社製CPUボード用のモータ制御向けI/O制御関数を
標準で実装しております。
|
|
ブロック・ダイアグラム
|
|
|
Simtrol−mに実装されている、I/O関数ブロックの使用例
(上記ブロック・ダイアグラムより抜粋)
|
|
Simtrol−mのI/O関数ブロック各種を使用すると、
各種ハードウェアによる入出力インターフェース機能を
直接、ブロック・ダイアグラム上で表現し利用することが出来ます。
ハードウェアの機能による制約等は関数に内包されておりますので、
通常の関数と同様に、対応するハードウェアに入出力されるデータの
流れを考えるだけで良く、設計が容易になります。
|
|
|
KENTAC13600用 A/D入力例
|
|

|
|
|
KENTAC13600用
PWM出力・D/A出力例
|
 |
|
|
KENTAC13600用
カウンタ入力例(エンコーダ入力)
|
 |
|