電気自動車製作実習装置

★ハードウェアの製作実習ソフトウェアの作成
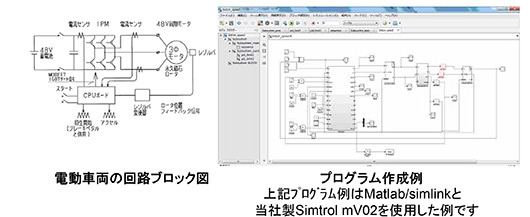
★Matlabを使用したEVモータ回転のソフトウェアの作成
★回生エネルギーの学習
★EVモータのベクトル制御
概要と学習項目
学習項目の例
(1)インターフェース基板の作成
(2)インバータ部の作成
(3)ブラシレスモータの駆動学習
(4)組立実習
(5)ソフトウェアの製作実習
(6)Matlabを使用してのプログラム学習
電動車両の需要
キャパシタ容量の計測
ブラシ レスDCモータは、ブラシ付きモータに比べると小型化が容易でモータから出るノイズが少なく、速度の調 整範囲が広く長寿命と言われています。
短所としては制御回路が複雑で、ロータの位置検出回路とイン バータをPWM制御しながら電流を流す必要があるため、プログラム作成が難しいと言われています。
ブラシレスDCモータの需要は高く、特に家電・自動車産業界に止まらず、モータを使用する業界に幅広く 用いられています。
家電ではエアコン・冷蔵庫・洗濯機などのモータを使用した機器の省エネルギー化に 貢献しています。自動車産業では走行用モータに、機械業界ではサーボモータと呼ばれる殆どのモータに 使用され、燃費の向上や省エネ等に貢献しています。
CPU :SH2A-7216
クロック:12.5MHz(内部200MHz)
内蔵ROM :1MB
内蔵RAM :128KB
●電気自動車製作実習装置(インターフェース部)
電流センサ:3個
外付VR :2個
アナログ入力:3点(バッテリ温度測定・電圧測定、 タコジェネ入力)
デジタル入力:8点
デジタル出力:8点
速度センサ: ホール素子/エンコーダ入力1点 差動式ホール素子/エンコーダ入力 1点
PWM出力:3相1軸PWM (6bit)
●電気自動車製作実習装置(インバータ部)
IPM :600V100A
IPM制御回路(アームショート防止回路)
●モータ
ブラシレスDCモータ:48V 750W レゾルバセンサ
●車体
レーシングカートを使用
KENTAC 5100PC
★電気自動車を理解する★ハードウェアの製作実習ソフトウェアの作成
★Matlabを使用したEVモータ回転のソフトウェアの作成
★回生エネルギーの学習
★EVモータのベクトル制御
概要と学習項目
 |
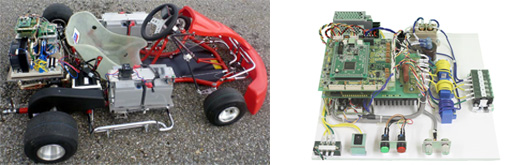
概要 レーシング用ゴーカートのエンジン部分を750W電動車両用(EV)モータに変更し ました。 それに付随した電気制御回路 (インバータやバッテリ等)を搭載しました。 制御は正弦波ベクトル制御です。 電装品 は完成品でも部品販売でも可能です。 |
(1)インターフェース基板の作成
(2)インバータ部の作成
(3)ブラシレスモータの駆動学習
(4)組立実習
(5)ソフトウェアの製作実習
(6)Matlabを使用してのプログラム学習
電動車両の需要
キャパシタ容量の計測
実験装置の仕様
近年の電動車両は、ブラシを持った直流モータから、ブラシレスDCモータに変わってきています。ブラシ レスDCモータは、ブラシ付きモータに比べると小型化が容易でモータから出るノイズが少なく、速度の調 整範囲が広く長寿命と言われています。
短所としては制御回路が複雑で、ロータの位置検出回路とイン バータをPWM制御しながら電流を流す必要があるため、プログラム作成が難しいと言われています。
ブラシレスDCモータの需要は高く、特に家電・自動車産業界に止まらず、モータを使用する業界に幅広く 用いられています。
家電ではエアコン・冷蔵庫・洗濯機などのモータを使用した機器の省エネルギー化に 貢献しています。自動車産業では走行用モータに、機械業界ではサーボモータと呼ばれる殆どのモータに 使用され、燃費の向上や省エネ等に貢献しています。
仕様
●電気自動車製作実習装置(CPU部)CPU :SH2A-7216
クロック:12.5MHz(内部200MHz)
内蔵ROM :1MB
内蔵RAM :128KB
●電気自動車製作実習装置(インターフェース部)
電流センサ:3個
外付VR :2個
アナログ入力:3点(バッテリ温度測定・電圧測定、 タコジェネ入力)
デジタル入力:8点
デジタル出力:8点
速度センサ: ホール素子/エンコーダ入力1点 差動式ホール素子/エンコーダ入力 1点
PWM出力:3相1軸PWM (6bit)
●電気自動車製作実習装置(インバータ部)
IPM :600V100A
IPM制御回路(アームショート防止回路)
●モータ
ブラシレスDCモータ:48V 750W レゾルバセンサ
●車体
レーシングカートを使用


 FLASH/WEB制作:CHACO-WEB.COM
FLASH/WEB制作:CHACO-WEB.COM