ACサーボPID制御実習装置 KENTAC2110 - 製品案内
SEARCH
KenTacの製品を探す
- カテゴリーから探す
- 型式・キーワードから探す
- 学習内容から探す
ACサーボPID制御実習装置 KENTAC2110
- モータ制御の基礎、フライホイール負荷のモータPID制御の学習に最適です。
- 速度制限と位置決め制御のPID制御の学習
- Simtrol_mによるモデルベース開発が可能
- シミュレーションと実機動作との比較が可能
製品の特徴

- フライホイール負荷を可変させてPID制御を行います。
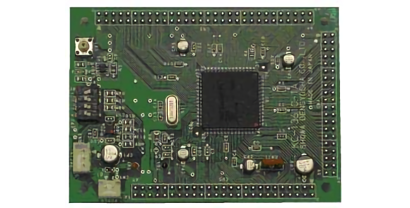
- 32bitマイコンを使用しています。
- 実習用モータはエンコーダ付ブラシレスDCモータです。
- 特にモータ制御で多用されるPID制御が学習出来ます。
- ブラシレスDCモータのベクトル制御が行えます。
ベクトル制御のC言語ソースコード公開
学習項目
- ACサーボモータの速度制御
- ACサーボモータの位置制御
- PID定数変更によるモータ制御の挙動の違いをシュミレーションと実機動作で学習
- ブラシレスDCモータのベクトル制御が行えます。
- Simtro-mによるモデルベース開発(シュミレーションとプログラム変更)
仕様
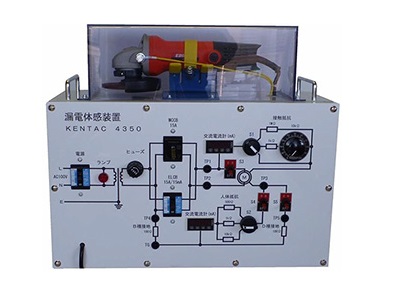
- インバータ仕様(KENTAC 13610-10-231)
・32bitマイコンボード(KENTAC 13600)
CPU :SH 7085(SH2)(80MHz)
A/D :内部10bit 8ch
D/A :4chシリアル12bit
書き込み:RS232C
メモリ :EEPROM512kB,RAM32kB
・インバータ用制御電源
KENTAC 3015の仕様をご参照ください。
・DC電源
入 力 :AC100V,出力DC5〜100V,5A
・インバータ寸法:約350(W)×250(D)×170(H)mm 約3.5kg
・モータ架台寸法:約150(W)×200(D)×140(H)mm 約3kg
・DC可変電源寸法:約71(W)×400(D)×137(H)mm 約3kg
- ○モータ仕様
モータの種類:エンコーダ付ブラシレスDCモータ
定格電流:1.8A
定格電圧:100W
定格出力:100W
定格回転数:3000rpm
エンコーダ:2048ppr(A,B,Z相)
- フライホイール仕様
おもり3個時 J = 0.000543 [kg・m2]
- ○Simtrol-m-AD 1ライセンス付
Simtrol-mの仕様を参照ください
- C言語サンプルプログラム付
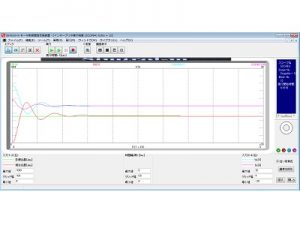
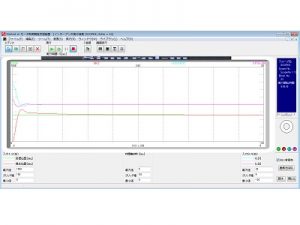
負荷3個時 負荷1個時
電流とモータ回転角のシミュレーション


CONTACT
お問い合わせ
計装機器のメンテナンス相談・製品について・資料請求・
お見積もり依頼など、お気軽にお問い合わせください。
お電話でのお問い合わせ

受付時間 8:30~17:30
(土日・祝日除く)